

无人机倾斜摄影测量如何确定航高(无人机倾斜摄影在1:500地籍测图的应用)
利用无人机倾斜摄影技术可以全自动、高效率、高精度、高精细的构建地表全要素三维模型。本文详细介绍了利用倾斜摄影实景模型内业绘制1:500地籍图流程,并对成果进行了精度验证;为地籍图测绘工作提供一种新的视角和模式。
地籍测量包含着地籍调查和地籍图测绘两方面工作,其中地籍图测绘主要是对宗地的地籍界址点、权属界线、土地面积、土地用途等的定位与定性相结合的测绘工作,在定位测量方面有着较高的精度要求。以往地籍测量方法和仪器比较单一、笨重,而且精度较低,已经很难满足实际工作需要了。随着现代测绘技术的逐步完善,地籍测量从理论到实际发生了根本性变化。现代测绘技术对于地籍测量主要有四种模式:野外数字测量、GPS测量、数字摄影测量与遥感和内业扫描数字化测量。野外数字测量模式主要是全站仪+掌上电脑+测图软件;GPS测量模式主要是GPS-RTK接收机+全站仪+掌上电脑+测图软件;内业扫描数字化测量模式主要是对已有地形图或地籍图采集数字化地籍要素数据;数字摄影测量与遥感模式过去主要指以卫星、航天飞机等为平台获取的影像。这四种模式各有优缺点,具体见下表:
表1 4种地籍测量模式优缺点
模式名称
野外数字测量
GPS测量
内业扫描数字化测量
数字摄影测量与遥感
优点
多种数据格式融合显示,现场成图
适应任何地形环境条件、高精度、远距离数据采集
外业劳动强度低
卫星、航天飞机影像:覆盖范围广
缺点
外业劳动强度大、耗时长
卫星限制、地物干扰、缺少多余观测、高程数据不准确
要求测区的地形图或地籍图现势性强,并且具有完备的控制点和目标点
卫星、航天飞机影像:成本高、影像精度低
以上4种地籍测量模式或存在工作效率低或成图精度低或不能快速测图的紧迫问题,无人机倾斜摄影测量技术的出现给地籍测量带来了新的契机。无人机航测系统具有成本低廉、时效性强、航飞效率高、任务完成周期短等优点;同时倾斜摄影测量技术颠覆了以只能在垂直角度拍摄获得影像的局限,通过在飞行平台上搭载多台传感器同时从多个角度拍摄地面影像,影像具有高分辨、地物信息全面等特点。利用无人机航测系统影像分辨率高、操作便捷、灵活、精度高等特点,文献[4]提出的方案实现了农村1:500地籍测图,但用正射影像进行地籍测图存在地物遮挡、界址点判断不直观、不准确问题,会降低测图精度;文献[]实现了城镇1:500地籍测图,但对无人机影像生成的三维DSM点云进行筛选与删除获得DEM过程对作业人员素质要求高,并且示例方案缺乏可重复性。
本文提出基于无人机倾斜摄影测量技术测绘1:500地籍图方法,研究了该方法的具体生产流程。与其他无人机测图手段不同,该方法通过无人机航测系统的采集的数码影像(仅倾斜影像)自动生成地物点云和实景三维模型,实现基于三维模型数字化测图。
数据描述
本测试区域为福建省某镇,测区面积0.1,测区内地形高差8.88m,测区内房屋最高31.98米,建筑物密度较大。测试使用的航摄设备为为武汉大势智慧科技有限公司的双鱼4.0(A款),搭载飞行平台为大疆M600Pro。该系统相比一般航空倾斜摄影系统具有飞行可行性高、定位精度高、操作简便等特点,可以满足三维建模高精度数据获取的需求。M600Pro、双鱼4.0(A款)参数如下:
表2 M600Pro参数
表3 系统参数
外业航飞前,首先收集测区资料,包括像控点成果、高程基准参数和坐标系统、已有地形图成果和地名资料等,制定无人机航飞技术方案并申请空域。通过表4航飞参数,获得测试区域6098张倾斜影像和POS数据文件。其中POS文件记录了无人机飞行轨迹,拍摄曝光瞬间的位置姿态信息,包括编号、曝光时刻、经度、纬度、绝对航高、俯仰角、滚转角和旋偏角。
表4 航飞参数
在测区内布设了8个像控点,像控点平均间距约为150米,像控点分布如图1示。像控点布设是为了保证三维建模及数字测图精度,像控点选取不能太靠测区边缘,最好选在重叠度较大的地方。量测像控点时,需要实地拍摄近景照和远景照,为内业刺点提供依据。
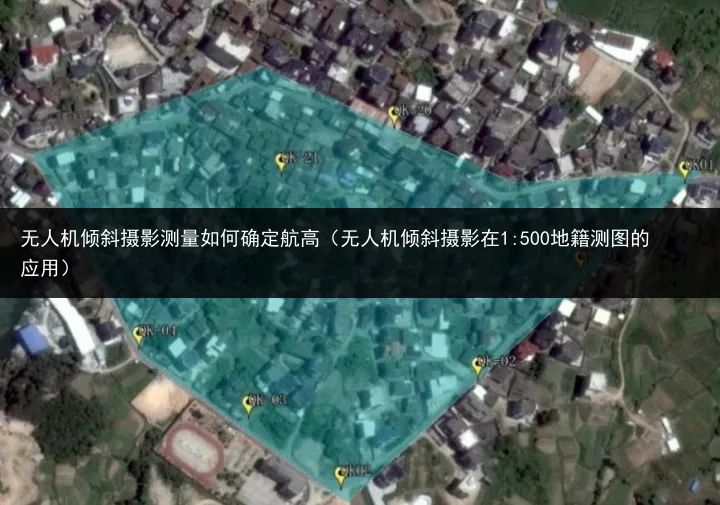
图 1 像控方案
研究方法
获得无人机倾斜影像、POS数据和像控点坐标后,进行内业数据处理。本次测试利用是Bentley软件公司的ContextCapture center4.4.8版本软件对倾斜影像数据进行空中三角测量以及生成实景三维模型。
影像写入POS数据:本次测试使用的POS数据本质特征是采样时间为5赫兹-10赫兹,并经后差分处理的GPS坐标。新建工程,导入倾斜影像数据。导入相机参数:由于ContextCapturecenter4.4.8软件对相机参数要求较高所致;参数建议导入同型号相机以前工程项目参数。初次空三,获得倾斜影像和相机相对位置、姿态以及地物的特征点云。检查地物特征点云以确保没有明显的分层现象;检查影像有无交叉、分层现象。刺像控点:像控点导入前需选择对应的空间参考坐标系,若像控点使用的是地方坐标系,建议使用局部坐标系笛卡尔坐标系。本次测试数据使用的是西安80坐标系。刺点时,每个像控点至少在一个方向上的3张影像上刺出,不选择偏于影像的1/3位置的像控点,每个像控点至少在6张影像上刺出。再次空三,只需设置参数,就可以自动、准确地获得每幅倾斜影像的绝对位置、姿态和相机属性(焦距、主点、镜头畸变)。需再次检查地物特征点云以确保没有明显的分层现象,主要是检查道路或房屋区域的特征点云有无分层;检查影像位置,确保影像交叉准确,无分层;检查像控点的平面和高程误差是否过大,若平面和高程误差值均小于0.05m,可进行下一步操作,否则重新检查像控点情况,调整刺点情况。若三项检查均无问题,可进行实景三维模型构建。实景三维模型构建:设置建模区域范围,并根据电脑性能设置瓦片分块。瓦片大小建议维持计算机内存的一半。选择模型输出格式及纹理贴图,提交生产就可以自动生成三维模型。测试区域共分192个瓦片,选择OSGB产品,联机运算大约5小时,获得的实景三维模型。模型内部各个地物纹理清晰,位置坐标准确,模型可进行多角度多尺度浏览和量测。三维模型总观图如下:
图 2 三维模型总观图
结果分析
完成实景三维模型构建后,利用全站仪实际测量的房屋角点坐标值与模型上量取的坐标值进行对比,并统计误差,验证地籍测图精度。选取测区范围内分布均匀的30个房屋角点,其分布如图示:
图 3 检查点分布
查阅地籍测绘规范CH5002-94标准得知:1:500地籍图上坐标点的最大展点误差不得超过0.05m,其他地物点相对邻近控制点的点位中误差不超过0.25m。
根据平面中误差计算公式(1),获得30个检查点的平面中误差为0.038m。各个检查点具体误差统计见表。
其中N是检查点总个数;Δ是每个检查点的平面误差。
点位中误差(m)
±0.038
4 结论与展望
利用无人机倾斜影像获得测区面积为0.1的实景三维模型,测区范围内30个检查点的平面中误差仅为±0.038m,满足国家1:500高精度大比例尺地籍测图的生产要求。结合大比例尺地形图测绘实际,利用实景三维模型内业绘制的1:500地籍测量图,成图时间减少一半以上,人员减少4/5。特别是外业测量阶段,传统测图技术需要根据测区面积大小配备相应数量的测量人员,但无人机测图只需2~3人,降低了外业工作强度和测绘成本。内业成图时,可直接在实景三维模型上测图,无需配备立体显示、立体眼镜及手轮脚盘等立体采集设备,降低了测图成本。
随着时代经济建设发展飞速,土地使用情况变化快,要求地籍测图需有较强的现势性。政府部门可以做到“图账对应”,从而准确地掌握地籍信息。由无人机倾斜摄影获得地籍测图具有成图周期短,更新快的特点,为地籍图测绘工作提供了新的视角和模式。此外由倾斜摄影获得的实景三维模型具有更加直观、丰富的地理信息,会加快当下地籍管理实现从二维到三维的转变。



